Levitas
Parallel link robot for levitation and navigation
Levitas is an embodied interface that allows both physical and virtual displacement within an Immersive Virtual Environment (IVE). It consists of a modular wearable is used to control a mechanical motion base from which a user is suspended, enabling users to fly at their own will.
The interactions to control the navigation simulate natural human movement and are hands-free, facilitating other tasks' interactions.

Result

An embodied interface that allows both physical and virtual displacement within an Immersive Virtual Environment (IVE) was proposed and implemented. It consists of a modular wearable used to control a mechanical motion base from which a user is suspended. The motion base is able to navigate in 3D through seven wires whose length is adjusted via a parallel link manipulator. Three sets of interactions were designed:
- A multimodal interaction using brain and muscle activity, pressure and head movement to simulate swimming. If people relaxed, they started to float.
- An embodied interaction using head movements to navigate, emulating the head anticipation phenomenon during locomotion.
- A haptic-aided embodied interaction using head movements to navigate, and vibrations to predict the detected movement direction.
The results of several evaluations showed that:
- It is difficult for people to relax while having a flying experience, therefore, behavioral markers are best for interaction.
- Natural 2D locomotion embodied cues were successfully used to extend movement control to 3D space.
- Head movement cues alone led to 100% completion rate in navigation tasks.
- When compared to a Joystick, Levitas’ hedonic qualities and attractiveness are superior, even though the efficiency of target reach of the Joystick-based interaction is still higher.
- With more practice, users might navigate with a performance comparable with the Joystick.
- Haptic feedback to forecast machine detection of head movements did not provide significant improvements.

Method
Three main interactions were iteratively prototyped and tested.1. Multimodal Levitas
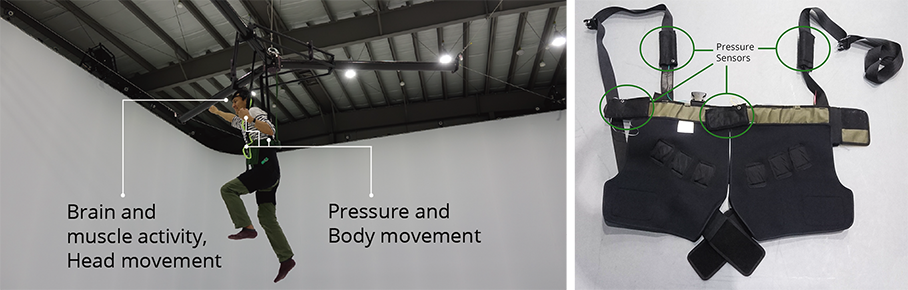
Through a combination of passive and active modalities, we enabled users to fly as if they were swimming. In addition to active commands activated through pressure sensors, electrophysiological measures and bodily movements are used for controlling the motion base and monitoring user's activity.
- Brain and muscle signals captured from the forehead were used as a measure of relaxation. If the users were relaxed, they started floating.
- Fabric pressure sensors around the harness were used to detect when the users became tense and held on to the harness. This made them sink and reach the ground.
- Head movement cues measured with an accelerometer placed on the head helped the users to move around. Additionally, fabric pressure sensors around the waist detected desired horizontal direction.
2. Embodied Levitas
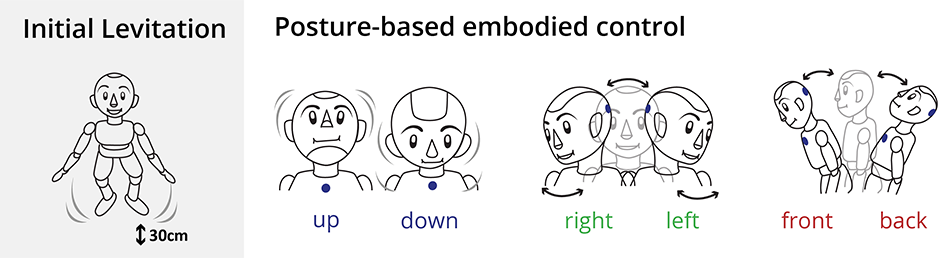
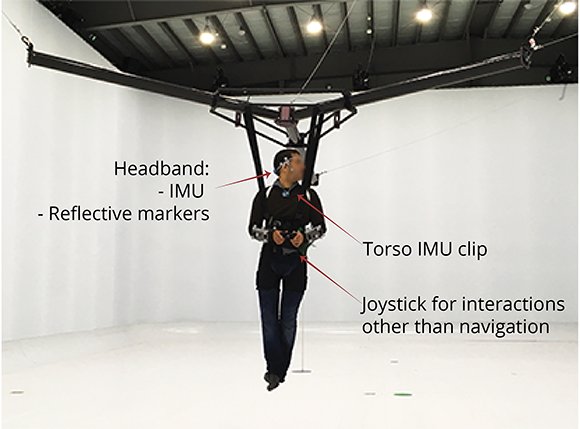
Our proposed interface uses two Inertial Measurement Units (IMU) integrated in a headband and a clip for the clothes. They are used to detect head and torso rotations which are intended to act as passive control inputs. Passive modalities are those that require no explicit input command. This design choice was made in an effort to create a perceptual interface based on body movements and states which people inherently perform.
We capitalized on the head anticipation phenomena during locomotion in 2D displacements where a rotation of the head anticipates the desired direction of movement. We expected to see it generalized in 3D navigation.
3. Embodied Levitas with Haptic Feedback
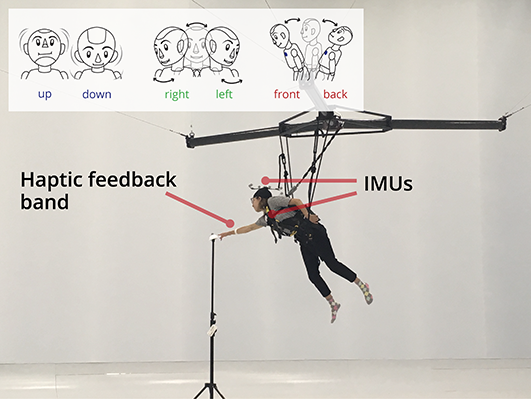
A bracelet providing haptic feedback with vibration was added to the Embodied Levitas to overcome the delay between the body command and the actual flying movement. Its purpose was to signal the users when the head movement command is recognized, so that they do not change positions while the motors are preparing the movement. The haptic feedback consists of a simple pulse of vibration lasting less than 500 ms.
Besides the aforementioned head movements mentioned, two new movements to navigate sideways were added. By reclining their heads on one shoulder or the other, users were able to move to sideways. Moreover, the wearable design and the harness were changed to improve mobility of the torso forwards and backwards.
Resulting academic publications and presentations
| Perusquía-Hernández, M., Enomoto, T., Martins, T., Otsuki, M., Iwata, H., Suzuki, K., “Embodied Interface for Levitation and Navigation in a 3D Large Space”, Proceedings of the 8th Augmented Human International Conference. Article 4, 8 pages. 2017. DOI: 10.1145/3041164.3041173 | Download Cite |
| Perusquía-Hernández, M., Martins, T., Enomoto, T., Otsuki, M., Iwata, H., Suzuki, K., “Multimodal Embodied Interface for Levitation and Navigation in 3D Space”, Proceedings of the 2016 Symposium on Spatial User Interaction, pp. 215, 1 page. 2016. DOI:10.1145/2983310.2989207 | Download Cite |